

产品介绍 |
| 机器人是一种自动化设备,其核心是通过预设程序或人工智能算法,或半地执行特定任务,以替代或辅助人类完成工作。机器人的所有物理动作都依赖电机的驱动。电机接收来自控制器的电信号,通过电磁感应或电磁力产生扭矩和转速,进而带动机械结构完成预设动作。机器人电机测试系统是专为人形机器人、具身机器人、工业机器人、仿生机器人等机器人关节电机、手指电机等设计的综合性检测平台,用于评估电机的动态性能、可靠性及能效表现。 |
详细资料 |
机器人电机测试系统 电机出厂测试性能特点
1.机器人空心杯电机测试 空心杯电机是一种直流电机,具有无铁芯的转子结构。空心杯电机的转子质量轻,惯性小,因而具有极快的加速度和减速度。这种特性非常适合需要快速启动、停止和频繁正反转的机器人关节,尤其是在需要高速运动和精密控制的应用中,如微型机械臂和手术机器人。空心杯电机运行时几乎没有齿槽效应,因此在转动时更平滑,噪音更低。 2.机器人无框力矩电机测试 机器人无框力矩电机是一种直驱电机,其转子和定子没有传统电机的外壳和轴承等结构元件,因此被称为“无框”。无框力矩电机通常直接驱动负载,不需要使用减速器或齿轮箱等传动组件,从而极大地减少了摩擦损失。无框力矩电机直接驱动的特性具有快速的响应速度和加速度,没有中间机械传动部件的存在,减少了机械惯性,使得电机能够更快地响应控制信号,适应快速变化的运动要求。专门设计用于产生高扭矩的电机,适用于需要高扭矩输出的机器人关节驱动。 3.机器人伺服电机测试测试 伺服电机是一种闭环控制系统,通过反馈机制实现非常的位置控制和速度控制。伺服电机通过高分辨率编码器实时反馈电机的转速和位置,能够在极高精度的范围内实现位置和速度的控制。伺服电机具有高精度、高响应速度、高扭矩输出的特点,广泛应用于需要高精度定位和动态性能控制的机器人系统。 4、机器人直流电机测试 直流电机的启动和制动非常迅速,适合用于需要快速响应的机器人应用中。特别是对于高速、频繁动作的场合,直流电机的快速响应特性有助于提高机器人的动态性能。直流电机的控制相对简单,可以通过调整电压或电流来控制速度和转矩,适合不同类型的机器人应用场景。无刷直流电机进一步提升了控制的度,通过微处理器和电子控制器,可以实现复杂的运动轨迹和精密定位。机 5、机器人步进电机测试 步进电机通过控制脉冲信号的数量和频率,可以地控制电机的转动角度和速度。步进电机能够以离散的步进方式运动,每一个步进对应一个固定的角度,具有开环控制、成本低、定位精度高的特点,适用于需要定位的机器人应用。
机器人电机测试系统 电机出厂测试技术参数
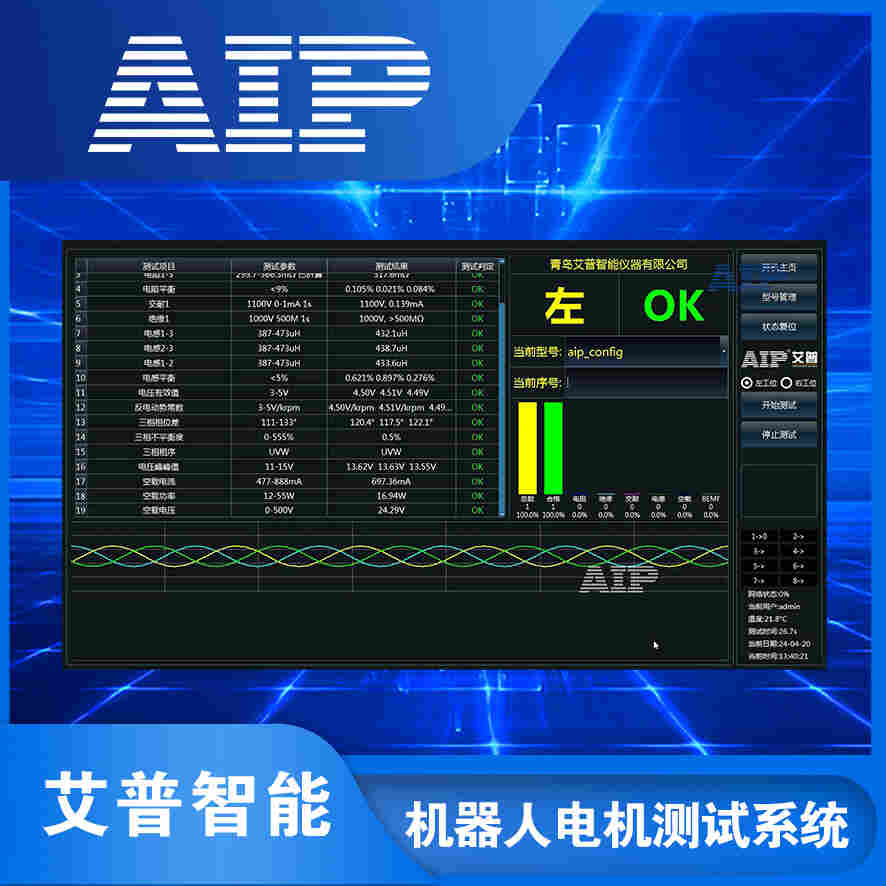
1.机器人空心杯电机测试 机器人空心杯电机常见的测试项目有:匝间耐压、交流耐压、绝缘电阻、直流电阻、霍尔测试、转速测试、空载测试、反电动势测试、NVH测试、性能测试等。 2.机器人无框力矩电机测试 机器人无框力矩电机的测试项目包括:空载测试、负载测试、扭矩测试、效率测试、NVH测试、齿槽转矩测试、电机性能测试等。 3.机器人伺服电机测试测试 机器人伺服电机常见的测试项目有:交流耐压、绝缘电阻、直流电阻、空载测试、反电动势测试、NVH测试、齿槽转矩测试、摩擦扭矩测试、分离扭矩测试、性能测试等。 4.机器人直流电机测试 器人直流电机的测试项目包括:匝间耐压、交流耐压、绝缘电阻、直流电阻、霍尔测试、转速测试、空载测试、负载测试、反电动势测试、齿槽转矩测试、摩擦扭矩测试、分离扭矩测试、NVH测试、性能测试等。 5.机器人步进电机测试 机器人步进电机的测试项目包括:交流耐压、相间耐压、绝缘电阻、直流电阻、静力矩测试、NVH测试、电感测试、匝间耐压测试、反电动势测试等。 |
在线客服
-
客服

- 手机:13573295322
